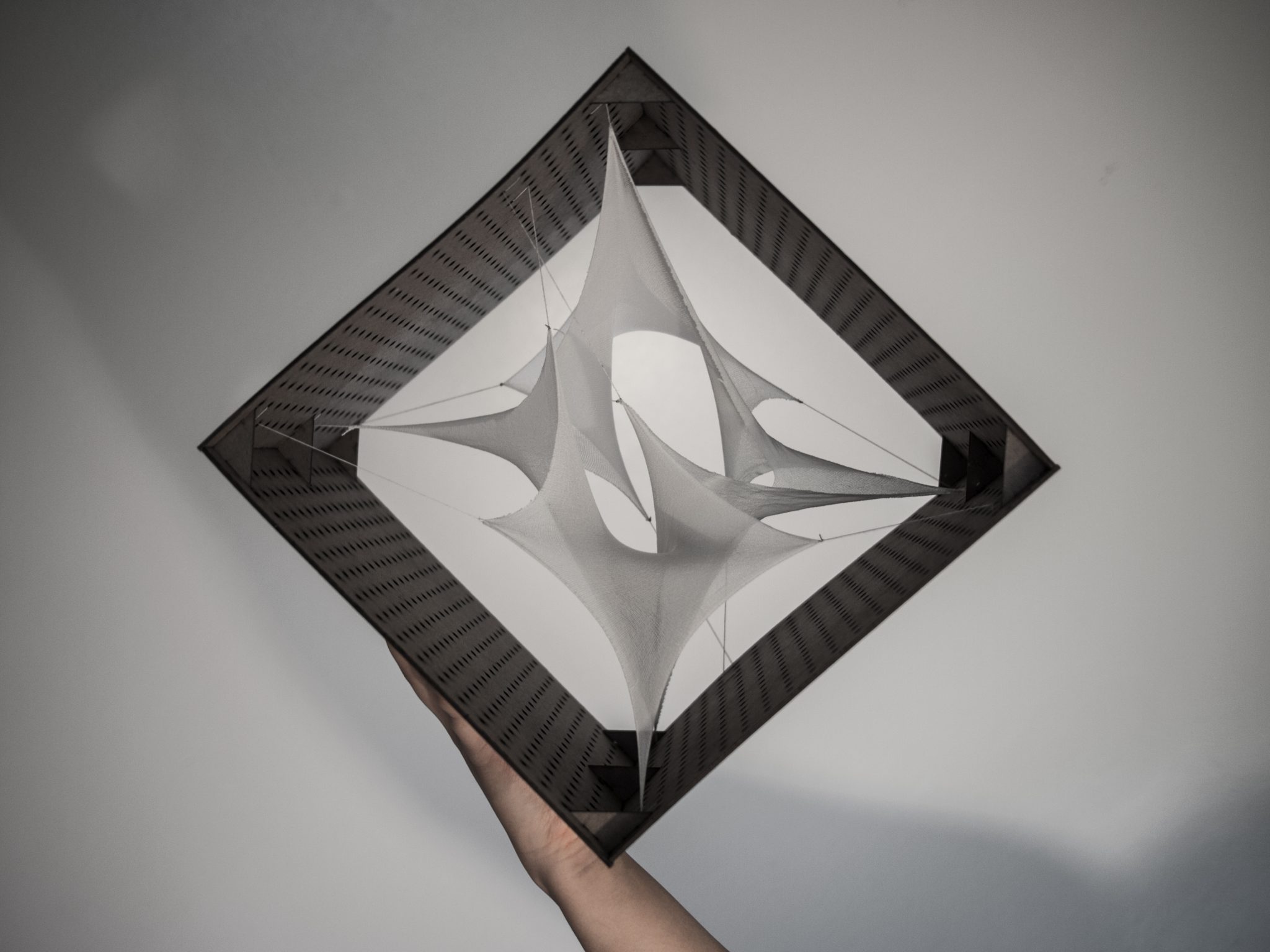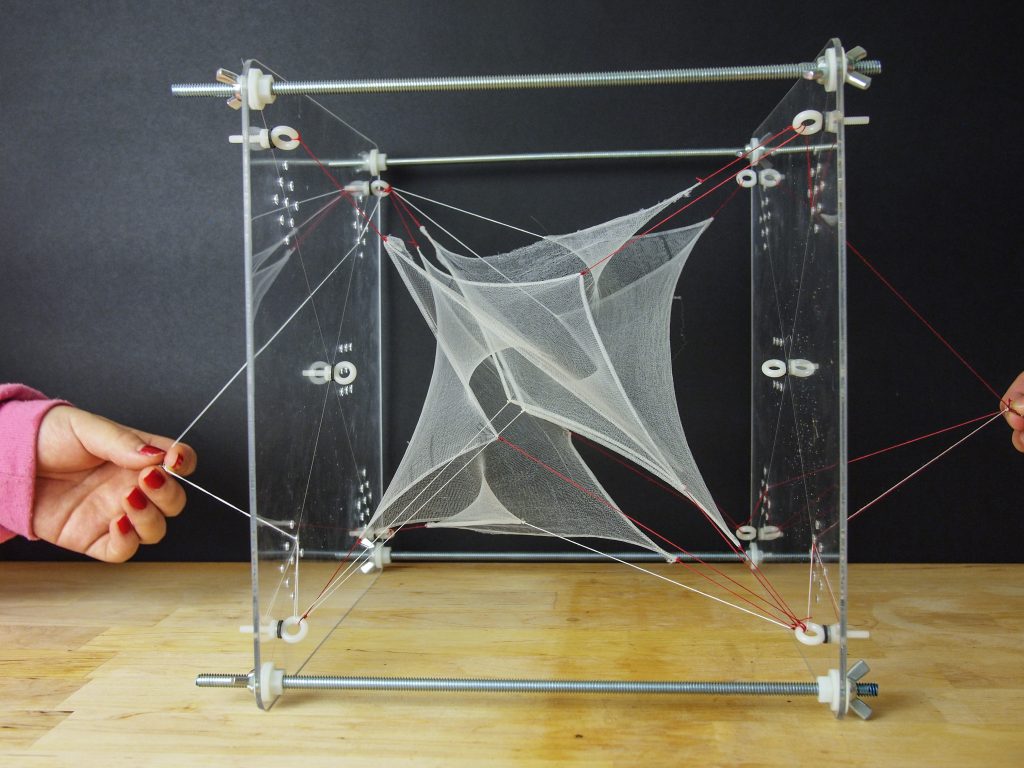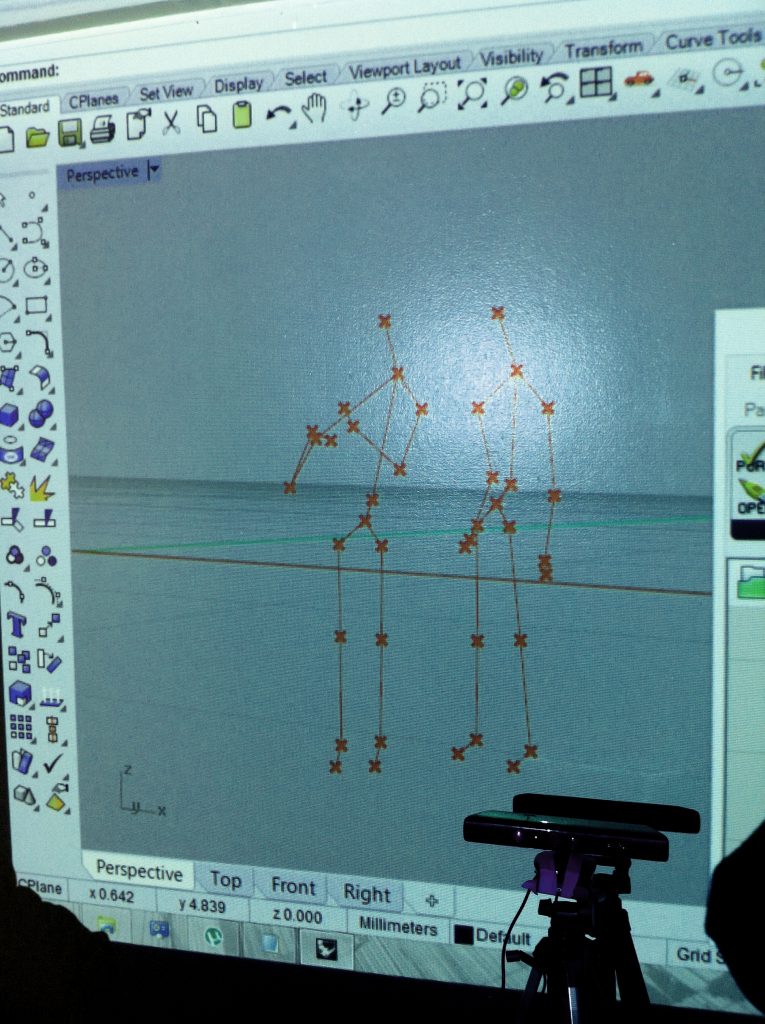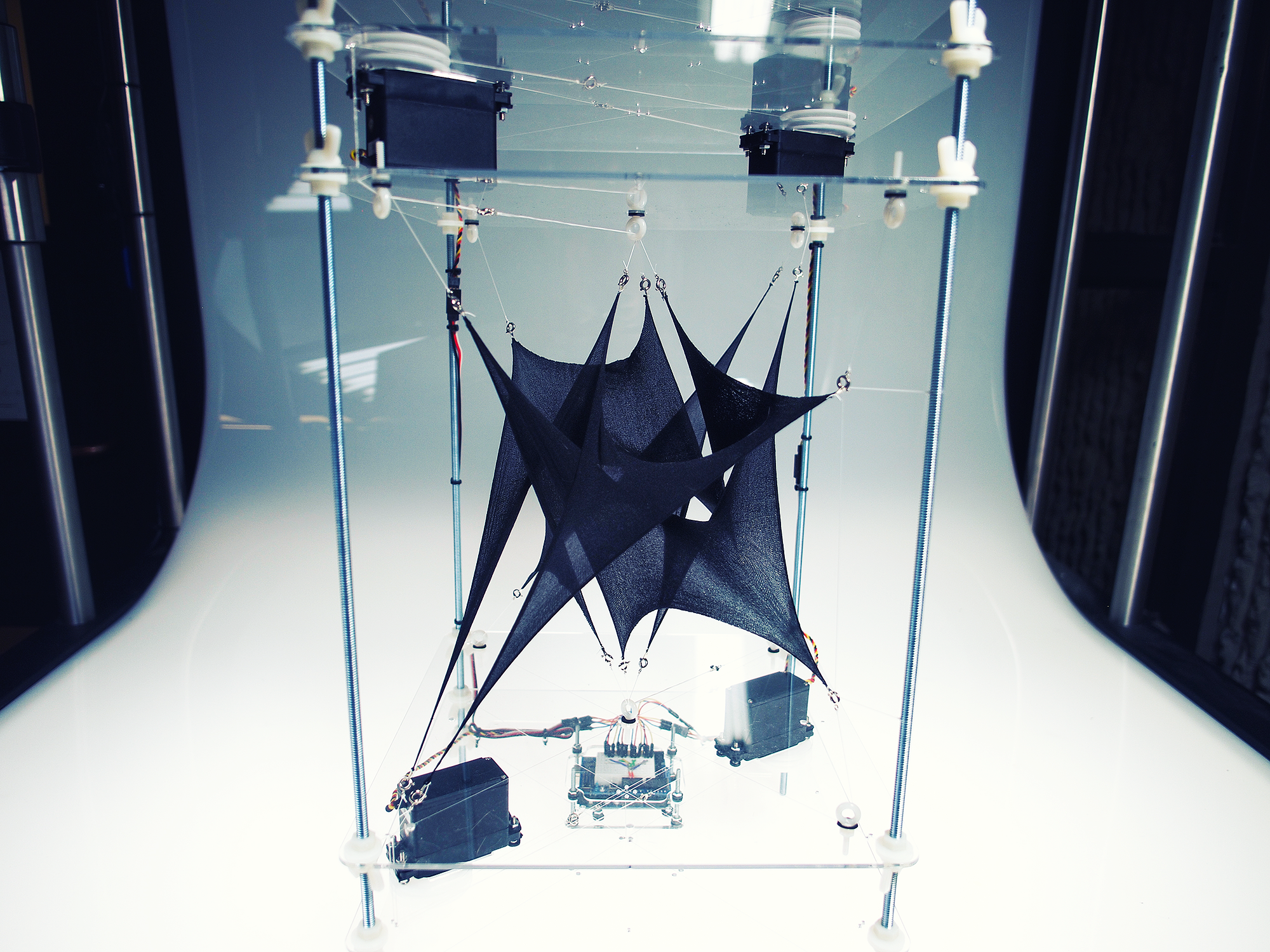
The Kinetic Membranes installation is the final model developed utilizing a collection of digital techniques to create an interactive, dynamic, and fluid form. This acts as a proof of concept for use in a large scale construct in which a space could be continually and wirelessly adjusted.
The final prototype developed utilizing a collection of digital techniques to create an interactive, dynamic, and fluid form.